आधुनिक युग में, वैज्ञानिक और इंजीनियर सब कुछ स्वचालित बनाने की कोशिश कर रहे हैं। इसका मतलब है कि सब कुछ बिना किसी मानवीय प्रयास के अपने दम पर काम करेगा। समाज में एक बहुत ही सामान्य समस्या की पहचान की गई थी कि कुछ लोगों को अपने स्वयं के फावड़े बांधने में परेशानी होती है। इन लोगों में विकलांग, पीठ दर्द वाले लोग, बच्चे और अंधे लोग कुछ हद तक शामिल हैं। इसलिए, एक समाधान बनाया जाना चाहिए ताकि ये लोग इसे एक समस्या के रूप में न देखें।

चित्र निर्देशांक से लिया गया
इस परियोजना में, हम एक स्वचालित लेसिंग शो बनाने जा रहे हैं जो बिना किसी मानवीय प्रयास के स्वचालित रूप से अपने लेस को टाई करेगा। यह माइक्रोकंट्रोलर बोर्ड, एक मोटर ढाल सेंसर और एक सर्वो मोटर की मदद से करेगा, जैसे ही एक जूता के अंदर पैर रखता है।
कैसे Arduino का उपयोग कर अपने शो AutoLace करने के लिए?
अब, जैसा कि हम परियोजना के सार को जानते हैं, आइए हम अधिक जानकारी एकत्र करना शुरू करें और इस प्रक्रिया से गुजरें कि कैसे इस ऑटोलस जूते को Arduino का उपयोग करके बनाया जाए।
चरण 1: घटकों को एकत्रित करना
किसी भी परियोजना को शुरू करने के लिए सबसे अच्छा तरीका है घटकों की एक सूची बनाना और इन घटकों के एक संक्षिप्त अध्ययन से गुजरना क्योंकि कोई भी केवल एक लापता घटक के कारण किसी परियोजना के बीच में चिपकना नहीं चाहेगा। इस परियोजना में हम जिन घटकों का उपयोग करने जा रहे हैं, उनकी एक सूची नीचे दी गई है:
- अरुडिनो अनो
- मोटर शील्ड
- सर्वो मोटर
- बल
- एलईडी
- 1k-ओम रेसिस्टर
- जूता
- धातु पट्टी
- प्लास्टिक जिप टाई
- 1/8
- जम्पर तार
- बैटरी
चरण 2: घटकों का अध्ययन
अब जैसा कि हम अपनी परियोजना के सार को जानते हैं और हमारे पास सभी घटकों की एक पूरी सूची भी है, आइए हम एक कदम आगे बढ़ते हैं और उन घटकों का एक संक्षिप्त अध्ययन करते हैं जो हम उपयोग करने जा रहे हैं।
सीड्यूइनो v4.2 दुनिया में सबसे अच्छा Arduino संगत बोर्डों में से एक है जो माइक्रोकंट्रोलर Atmega 328 MCU पर आधारित है। क्योंकि यह उपयोग करने में आसान है, अधिक स्थिर है और यह कई अन्य बोर्डों की तुलना में बेहतर दिखता है। यह Arduino बूटलोडर पर आधारित है। इसमें UART-to-USB कनवर्टर के रूप में ATMEGA16U2 है क्योंकि oof जिसे इसे FTDI चिप के रूप में इस्तेमाल किया जा सकता है। यह माइक्रो यूएसबी केबल का उपयोग करके कंप्यूटर से जुड़ा होता है जिसे आमतौर पर एंड्रॉइड केबल कहा जाता है। बोर्ड को बिजली देने के लिए एक डीसी जैक का भी उपयोग किया जा सकता है। इनपुट पावर 7V से 15V तक होनी चाहिए।

सीड्यूइनो बोर्ड
Arduino मोटर शील्ड आप आसानी से एक Arduino का उपयोग मोटर दिशा और गति को नियंत्रित करने के लिए सक्षम बनाता है। आपको केवल Arduino पिन को संबोधित करने में सक्षम करने से, आपके उपक्रम में किसी भी मोटर को चलाना आसान हो जाता है। यह अतिरिक्त रूप से आपको 12 वी तक की विभिन्न विद्युत आपूर्ति के साथ मोटर को नियंत्रित करने का विकल्प देता है। सबसे अच्छा, ढाल को ढूंढना बहुत आसान है। इन सभी कारणों के लिए, Arduino मोटर शील्ड अगर एक शांत थोड़ा तेजी से प्रोटोटाइप, और सामान्य प्रयोग के लिए अपने शस्त्रागार में है।

मोटर शील्ड
बल सेंसर प्रतिरोधक (FSRs) दबाव सेंसर का उपयोग करने के लिए बहुत सरल और आसान है। एक एफएसआर की रुकावट वजन का पता लगाने वाले क्षेत्र पर लागू होती है। आप जितना अधिक वजन कम करेंगे, विपक्ष उतना ही कम होगा। बाधा रेंज काफी विशाल है:> 10 MΩ (कोई वजन नहीं) से ~ 200 quite (अधिकतम वजन)। अधिकांश एफएसआर 100 ग्राम से 10 किलोग्राम के दायरे में शक्ति का पता लगा सकते हैं। एक FSR में दो परतें और एक स्पेसर चिपकने वाला होता है। जब कोई भार नहीं लगाया जाता है तो संवाहक परत एक पतली हवा के अंतराल से अलग हो जाती है। एक फिल्म में पूंछ से पता लगाने वाले क्षेत्र (गोल भाग) तक दो निशान होते हैं। ये निशान एक साथ बुने हुए हैं, हालांकि संपर्क नहीं कर रहे हैं। दूसरी फिल्म एक प्रमुख स्याही से ढकी हुई है। जब आप सेंसर पर धक्का देते हैं, तो स्याही एक विरोध के साथ दो निशान को छोटा करती है जो वजन पर निर्भर करता है।

बल संवेदक
सेवा सर्वो मोटर एक रोटेट्री या एक लीनियर एक्ट्यूएटर है जिसे सटीक वृद्धि में नियंत्रित और स्थानांतरित किया जा सकता है। ये मोटर्स डीसी मोटर्स से अलग हैं। ये मोटर्स कोणीय या घूर्णी गति के सटीक नियंत्रण की अनुमति देते हैं। यह मोटर एक सेंसर के साथ युग्मित है जो इसकी गति के बारे में प्रतिक्रिया भेज रहा है।

सर्वो मोटो
चरण 3: कार्य सिद्धांत
इस परियोजना का कार्य सिद्धांत बहुत सरल है। शो में पैर रखा गया है या नहीं, यह पता लगाने के लिए एक बल सेंसर का उपयोग किया जाएगा। यदि यह पैर का पता लगाता है, तो यह Arduino बोर्ड को एक संकेत भेजेगा जो एक Arduino Motor Shield की मदद से सर्वो मोटर को स्थानांतरित करेगा। यह सर्वो मोटर इस तरह से आगे बढ़ेगी कि यह एक ही बार में सभी लेस खींच लेगी। इसलिए जूते के सभी लेस को स्वचालित रूप से बांधना।
चरण 4: अवयवों को असेंबल करना
अब जैसा कि हम इस परियोजना के पीछे के मुख्य विचार और कार्य सिद्धांत को जानते हैं, आइए हम एक कदम आगे बढ़ते हैं और एक शो बनाने के लिए सब कुछ इकट्ठा करना शुरू करते हैं जो अपने आप ही लेज हो जाएगा। अंतिम उत्पाद बनाने के लिए, नीचे दिए गए चरणों से गुजरें:
- सबसे पहले, एक छोटी धातु की प्लेट को ट्रिम करें ताकि यह शो के पीछे तय हो। एक सिंथेटिक का उपयोग करें ताकि यह स्थायी रूप से ठीक हो जाए और ढीला न हो। सुनिश्चित करें कि आप धातु की प्लेट और शो के बीच एक अंतर छोड़ देते हैं क्योंकि हम उस अंतराल को कुछ केबल टाई से गुजारेंगे।
- अब दो सर्वो मोटर्स लें और उन्हें गर्म गोंद के साथ धातु की प्लेट में संलग्न करें। अब इसे स्थायी रूप से तय करने के लिए, उनके चारों ओर ज़िप संबंधों का उपयोग करें ताकि ये सर्वो मोटर्स बाद में न चलें। इमदादी मोटर्स गति में होने के बाद, जो अतिरिक्त केबल बची है उसे काट दें।
- अब मोटरों के नीचे एक बैटरी केस माउंट करें ताकि यह बिजली का स्विच बाहर की ओर हो।
- अब मोटरों पर Arduino बोर्ड संलग्न करें। मोटर ढाल को अरुडिनो से जोड़ने से पहले, कुछ चीजों को सर्किट में जोड़ने की आवश्यकता होती है।
- एक एलईडी और सोल्डर को इसके पॉजिटिव लेग पर ले जाएं और नेगेटिव लेग को एक शॉर्ट लेंथ और नेगेटिव के दूसरे लेग को सोल्डर करें। फिर इस असेंबली को अरुडिनो से कनेक्ट करें और इसे अप्रयुक्त शॉलेज़ सॉकेट में से एक पर धकेल दें।
- अब एक ले लो बल संवेदक और इसे अपने जूते में रखें जहाँ आपकी एड़ी आराम करेगी। बल सेंसर के पिनों को मिलाप करने की अनुशंसा नहीं की जाती है क्योंकि टांका लगाने वाले लोहे की गर्मी सेंसर के प्लास्टिक को पिघला सकती है। तो यह बेहतर है अगर आप इसे गोंद या डक्ट टेप करें।
- अंत में सभी लेस को इमदादी मोटर से बांधने के लिए एक जिप टाई का उपयोग करें, ताकि जब मोटर घूम जाए तो यह एक ही बार में सभी लेस को खींच ले।
सुनिश्चित करें कि एलईडी का सकारात्मक तार Arduino के pin2 से जुड़ा हुआ है। फोर्स सेंसर के Vcc और ग्राउंड पिन को Arduino के 5V और ग्राउंड से जोड़ा जाएगा और बल सेंसर के IN पिन को Arduino बोर्ड के A0 पिन से जोड़ा जाएगा। अंत में, इमदादी मोटर पिन को मोटर शील्ड में सावधानी से प्लग करें ताकि आप गलत कनेक्शन न करें।
चरण 5: Arduino के साथ शुरुआत करना
यदि आप पहले Arduino IDE से परिचित नहीं हैं, तो चिंता न करें क्योंकि नीचे, आप Arduino IDE का उपयोग करके माइक्रोकंट्रोलर बोर्ड पर कोड जलने के स्पष्ट चरण देख सकते हैं। आप Arduino IDE के नवीनतम संस्करण को डाउनलोड कर सकते हैं यहाँ और नीचे दिए गए चरणों का पालन करें:
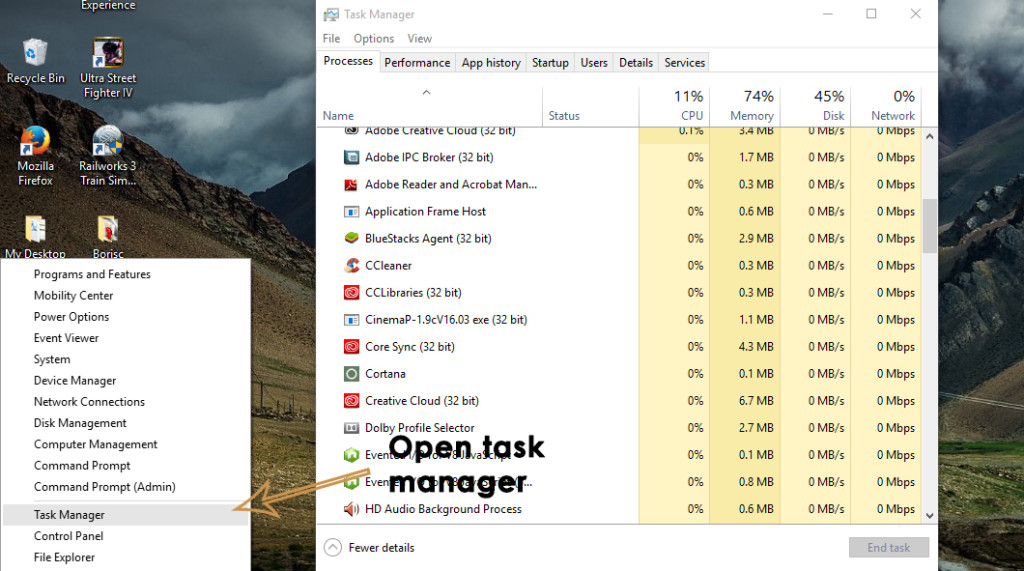
- जब Arduino बोर्ड आपके पीसी से जुड़ा होता है, तो 'कंट्रोल पैनल' खोलें और 'हार्डवेयर और साउंड' पर क्लिक करें। इसके बाद “डिवाइसेस एंड प्रिंटर्स” पर क्लिक करें। उस पोर्ट का नाम ढूंढें जिसमें आपका Arduino बोर्ड जुड़ा हुआ है। मेरे मामले में यह 'COM14' है, लेकिन यह आपके पीसी पर भिन्न हो सकता है।

पोर्ट ढूँढना
- हमें इमदादी मोटर का उपयोग करने के लिए एक पुस्तकालय शामिल करना होगा। पुस्तकालय कोड के साथ डाउनलोड लिंक में नीचे संलग्न है। के लिए जाओ स्केच> लाइब्रेरी शामिल करें> .ZIP लाइब्रेरी जोड़ें।

लाइब्रेरी शामिल करें
- अब Arduino IDE खोलें। टूल्स से, Arduino बोर्ड को सेट करें Arduino / जेनुइनो UNO।

बोर्ड की स्थापना
- उसी टूल मेनू से, पोर्ट नंबर सेट करें जिसे आपने कंट्रोल पैनल में देखा था।

पोर्ट की स्थापना
- नीचे दिए गए कोड को डाउनलोड करें और इसे अपने आईडीई पर कॉपी करें। कोड अपलोड करने के लिए, अपलोड बटन पर क्लिक करें।

डालना





आप द्वारा कोड डाउनलोड कर सकते हैं यहां क्लिक करें
चरण 6: कोड
कोड बहुत अच्छी तरह से टिप्पणी की है और आत्म व्याख्यात्मक है। लेकिन फिर भी, कोड को संक्षेप में नीचे समझाया गया है।
1. शुरुआत में, एक विशेष पुस्तकालय शामिल किया गया है ताकि सर्वो मोटर को माइक्रोकंट्रोलर बोर्ड के साथ एकीकृत किया जा सके और इसके माध्यम से प्रोग्राम किया जा सके। सर्वो मोटर के साथ दो वस्तुओं का उपयोग किया जाता है। कुछ पिन या Arduino आरंभिक हैं जो मोटर चालक से जुड़े होंगे और कुछ चर भी घोषित किए जाते हैं जो कुछ अस्थायी मूल्यों को बचाएंगे जो बाद में मुख्य कार्यक्रम में उपयोग किए जाएंगे।
#include // लाइब्रेरी में माइक्रोकंट्रोलर बोर्ड सर्वो myservo के साथ इंटरफ़ेस सर्वो मोटर शामिल करें; // सर्वो सर्वो को बनाता है 1 सर्वो myservo2; // create सर्वो ऑब्जेक्ट 2 int forcePin = 0; // अनुरूप पिन 0 बल सेंसर int ledPin = 2 से जुड़ा; // डिजिटल पिन 2 एलईडी इंट स्विचपिन से जुड़ा = 19; // सेट्स अनलॉक स्विच को एनालॉग पिन 5 इंट वेल; // सेंसर सेंसर इंट वैल का मूल्य; // स्विच इंट थ्रेसहोल्ड = 500 का मान; // परिभाषित करता है बल सेंसर दबाव दहलीज int servoUnlock = 0; // मुख्य इमदादी को बेअसर असमतल स्थिति (0 डिग्री) पर सेट करता है int servoLock = 180; // सेट करने के लिए मुख्य सर्वो को laced स्थिति (180 डिग्री) int servoUnlock2 = 180; // सेट ऑक्सिलरी सर्वो को न्यूट्रल अनलॉस्ड पोजिशन (0 डिग्री) इंट सर्व्लो 2 = 0; // सेट ऑसिलेरी इमदादी टू लेट पोजीशन (180 डिग्री)
2। व्यर्थ व्यवस्था() एक ऐसा फ़ंक्शन है जो प्रारंभ में केवल एक बार चलता है जब माइक्रोकंट्रोलर ओनो संचालित होता है या सक्षम बटन दबाया जाता है। इस फ़ंक्शन में, Arduino के पिनों को INPUT या OUTPUT के रूप में उपयोग करने के लिए प्रारंभ किया जाता है। पहले इमदादी मोटर के लिए बनाई गई वस्तुओं का उपयोग इमदादू बोर्ड के विशिष्ट पिन के लिए सर्वो मोटर को जोड़ने के लिए किया जा रहा है और इमदादी को प्रारंभिक असंगत स्थिति में ले जाया जा रहा है। इस फंक्शन में बॉड रेट भी निर्धारित है। बॉड रेट प्रति सेकंड बिट्स में गति है जिसके द्वारा माइक्रोकंट्रोलर बाहरी उपकरणों के साथ संचार करता है।
शून्य सेटअप () {Serial.begin // माइक्रोकंट्रोलर पिनमोड (ledPin, OUTPUT) की बॉड दर सेट करना; // डिजिटल पिन 2 एलईडी पिनकोड (स्विचपिन, INPUT) के लिए आउटपुट है; // एनालॉग पिन 5 स्विच myservo.attach (9) के लिए इनपुट है; // 9 myservo2.attach (10) पिन करने के लिए सर्वो संलग्न करता है; // 10 myservo.write (servoUnlock) पिन करने के लिए सर्वो संलग्न करता है; // चालित सर्वो 1 को अनलॉस्ड पोजीशन myservo2.write (सर्वोउलोक 2) में ले जाएं; // चालित पदों में सर्वो 2 को स्थानांतरित करें}3। शून्य लूप () एक फ़ंक्शन है जो एक लूप में बार-बार चलता है। सबसे पहले, बल सेंसर द्वारा एक एनालॉग मूल्य पढ़ा जा रहा है। फिर यह थ्रेसहोल्ड मान पास करने के लिए बल सेंसर के मान की प्रतीक्षा करता है। यह पैर के पूरी तरह से अपनी जगह पर बसने का इंतजार करेगा और दोनों सर्वो को लॉक पोजिशन में स्थापित कर देगा। यदि स्विच दबाए जाते हैं, तो इमो को अनलॉक करने के लिए सेट किया जाएगा और तब तक इंतजार करना होगा जब तक कि एलईडी सात बार ब्लिंग नहीं करेगा।
शून्य लूप () {valF = analogRead (forcePin); // बल सेंसर वैल का मूल्य पढ़ें = digitalRead (switchPin); // पढ़ें मान का मान यदि (VALF> = thresHold) {// बल संवेदक के लिए दबाव दहलीज के बराबर या पास होने की प्रतीक्षा करता है और फिर: विलंब (1000); // जूता myservo2.write (servoLock2) में जगह बनाने के लिए पैर की प्रतीक्षा करता है; // सेट ऑक्सिलरी सर्वो को बंद स्थिति में देरी (1000); // एक सेकंड myservo.write (सर्वो) का इंतजार करता है; // मुख्य सर्वो को बंद स्थिति में देरी (1000) सेट करता है; // एक दूसरे डिजिटलवाइट (ledPin, HIGH) का इंतजार करता है; // एलईडी अनिल इमदादी चालू करता है। बैटरी जीवन को बचाने के लिए इस लाइन को हटा दें। } अगर (VALS == हाई) {// स्विच होने का इंतजार किया जाए, और फिर: myservo2.write (servoUnlock2); // ऑक्सिलरी इमदादी देरी (1000) को अनलॉक करता है; // दो सेकंड का इंतजार करता है myservo.write (इमदादी); // मुख्य सर्वो देरी (500) को अनलॉक करता है; // प्रतीक्षा करें, फिर 7 बार digitalWrite (ledPin, LOW) एलईडी को ब्लिंक करें; देरी (200); digitalWrite (ledPin, HIGH); देरी (200); digitalWrite (ledPin, LOW); देरी (200); digitalWrite (ledPin, HIGH); देरी (200); digitalWrite (ledPin, LOW); देरी (200); digitalWrite (ledPin, HIGH); देरी (200); digitalWrite (ledPin, LOW); देरी (200); digitalWrite (ledPin, HIGH); देरी (200); digitalWrite (ledPin, LOW); देरी (200); digitalWrite (ledPin, HIGH); देरी (200); digitalWrite (ledPin, LOW); देरी (200); digitalWrite (ledPin, HIGH); देरी (200); digitalWrite (ledPin, LOW); देरी (200); digitalWrite (ledPin, HIGH); देरी (200); digitalWrite (ledPin, LOW); // देरी से एलईडी बंद हो जाती है (1000); }}तो यह एक शो बनाने की पूरी प्रक्रिया थी जो एक इमदादी मोटर, माइक्रोकंट्रोलर और एक मोटर शील्ड की मदद से अपने आप ही अपने लेस को अपने आप में बाँध लेती है। अब जैसा कि आप इस पूरी प्रक्रिया को जानते हैं, अपने घर पर अपने ऑटोलसिंग शो बनाने का आनंद लें।